
TPE – Transports et Transferts
Les voitures autonomes, pour 2018 ?
Sommaire
Introduction
Un nouveau besoin qui fonctionne ?
Fonctionnement
Niveaux d’autonomie
Exigences
Humain VS Machine
Systèmes Existants
Expérimentation
Les limites de la voiture autonome
Législation
Limites techniques
Limites économiques
Introduction
Le véhicule autonome est souvent présenté comme l’objet technologique indispensable du futur. Ce sujet a toujours intéressé les scientifiques et les investisseurs prêts à débourser des sommes d’argent impressionnantes pour obtenir ce marché. Cependant le fait de voir un véhicule rouler sans conducteur a toujours apeuré les populations. Des personnes créant des vidéos sur la plate-forme Youtube ont d’ailleurs fait des expériences prouvant que les gens n’étaient pas rassurés. Lors de ces expériences une personne est camouflée sur le siège conducteur et conduit la voiture. L’illusion fonctionne généralement bien puisque les personnes poussent des cris de peur. Dans la voiture ci-contre on croirait qu’il n’y a pas de conducteur or il y en a un. Cette expérience représente bien ce que deviendrait la voiture autonome lors de sa mise sur le marché. Nous nous intéresserons à la capacité de la voiture de réagir comme un humain et même de surpasser la capacité humaine. Nous répondrons à la problématique qui est : « Les voitures autonomes, prêtes pour 2018 ? »

Un nouveau besoin qui fonctionne ?
Fonctionnement
Maintenant il faut définir ce qu’est une voiture autonome. Pour cela, nous allons voir son fonctionnement et comment peut-il être réparti entre plusieurs niveaux selon les interventions humaines puis quel besoin y est associé. Un véhicule autonome doit être capable de circuler en autonomie totale ou partielle, on parlera dans ce cas d’un véhicule semi-autonome. Ces véhicules utilisent des technologies avancées pour fonctionner en sécurité. De telles machines nécessitent moins d’attention voir aucune. Les voitures semi-autonomes sont pour la plupart capables de garder une vitesse ou de s’y limiter (régulateur et limiteur de vitesse), d’autres peuvent rester sur une voie ou suivre un autre véhicule. Un autre niveau d’autonomie caractérise les véhicules qui peuvent prendre le contrôle du véhicule sur de courtes distances au cas où le conducteur le nécessiterait.
Niveaux d’autonomie
Un niveau d’autonomie juge les véhicules capables de rouler seuls, le meilleur étant l’autonomie totale quelle que soit la route et les conditions et dans certains cas, le contrôle peut toujours être repris par l’homme.
Niveau 1 : Le conducteur est le maître de sa voiture et l’ordinateur de bord ne peut à aucun moment contrôler la voiture.
Niveau 2 : Le conducteur possède quelques aides à la conduite, comme la direction ou le contrôle de vitesse. Le régulateur de vitesse peut faire partie de ces aides à la conduite.
Niveau 3 : Le conducteur peut être aidé par des aides à la conduite. La direction et le contrôle de vitesse peuvent fonctionner en même temps.
Niveau 4 : Le conducteur peut déléguer son rôle l’espace de quelques secondes. Par exemple : lors d’un embouteillage.
Niveau 5 : Ce niveau n’est pas autorisé en France, car les lois sont contraires à ce niveau. C’est à ce niveau que s’arrête le progrès en France. La voiture peut conduire toute seule sur de courtes distances pour aller se garer entre autres.
Niveau 6 : Ce niveau est le niveau dit d’autonomie, la voiture est totalement autonome et ne nécessite que le lieu de destination pour commencer à rouler. Ce niveau est le niveau attendu dans les prochaines années.
Exigences
Humain VS Machine
Le temps de réaction d’un humain est très variable, on le considère d’une seconde en moyenne mais la consommation d’alcool, de drogue ou la simple fatigue qui peut survenir en conduisant augmente ce chiffre rapidement. Les chiffres en parlent : la moitié des accidents mortels sont dus à la consommation d’alcool ou la fatigue.
Si on prend en considération le temps de réaction d’une seconde, on arrive à ces chiffres :
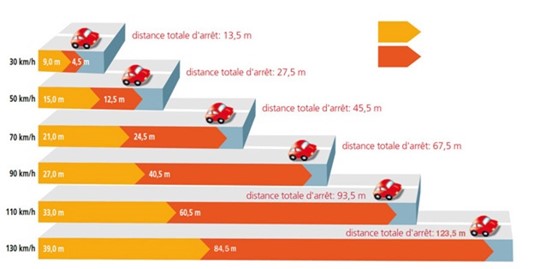
Distance parcourue en 1 seconde (temps de réaction moyen)
Distance de freinage (décélération approximative : 7m/s²)
À titre de comparaison, les capteurs d’une voiture fonctionnent avec les ondes électromagnétiques ou les ondes sonores. Ces dernières ont une vitesse approximative de 340m/s et équipent des capteurs d’une portée de 8m.
En supposant qu’un obstacle se trouve au maximum de leur portée, le temps que le son revienne jusqu’aux capteurs est d’environ 0,05 secondes.
Ceci s’additionne au temps de réaction du véhicule : ses algorithmes ultra-performants mettent un temps totalement négligeable pour agir.
On peut partir dans le contexte que le véhicule longe une file de voitures à l’arrêt et qu’un ballon surgit à 5 mètres : À une telle distance, un humain roulant à 30km/h avec sa seconde de réaction n’aurait pas eu le temps d’agir tandis que le véhicule autonome aurait même eu le temps de s’arrêter alors qu’il ne détecterait l’obstacle que 8 mètres devant lui !
Mais tout ceci ne concerne que les capteurs à ultrasons, les autres fonctionnent avec la lumière qui a une telle vitesse que le temps de détection et de réaction sont quasiment instantanés.
En effet, la plupart des capteurs fonctionnent avec la lumière, que ce soit des caméras alliées d’algorithmes de reconnaissance ultra-performants ou des radars à ondes radios. Comme les humains, les caméras sont faites de deux objectifs afin de visualiser l’environnement en trois dimensions et donc de se représenter les distances des obstacles. De plus, selon la disposition des objectifs, on peut soit créer des caméras grand angle (souvent d’environ 140°) ou des caméras longue portée pouvant aller jusqu’à 250m (cf : graphique distances de freinage) !
Les constructeurs peuvent également mettre autant de caméras qu’ils le souhaitent pour avoir une couverture complète autour de tout le véhicule mais ils doivent bien sûr rendre ces voitures le plus abordable pour le public.
Systèmes Existants
Précédemment, nous avons vu les capacités sur-humaines des véhicules autonomes et… C’est effectivement sur-humain :
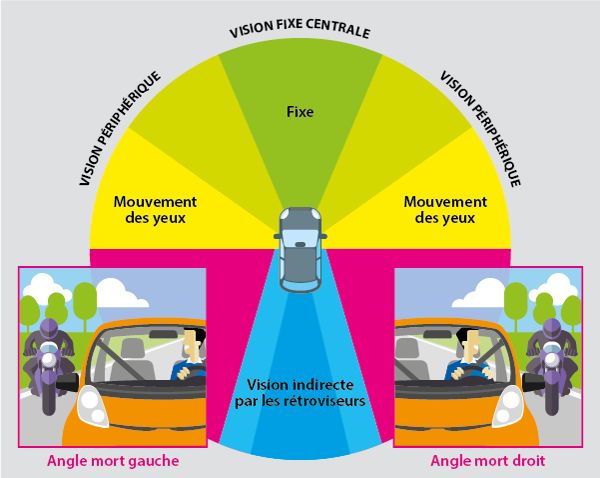
Un conducteur ne peut voir que devant lui, où sont ses yeux. Les rétroviseurs sont bien sûr très importants mais il reste cependant des angles sans visibilité qui requièrent au minimum un mouvement de la tête, nommées angles morts et qui sont souvent la cause d’accidents mortels.
Ce schéma montre approximativement les angles de vision mais nous pouvons clairement voir en violet les angles morts :
Les États-Unis utilisent une ville fantôme, nommée Mcity, où des voitures autonomes sont testées. Construite il y a un an près de l’Université du Michigan à Ann Arbor, des obstacles complexes ont été créés sur 13 hectares tels que des voies multiples, ronds-points, pistes cyclables, arbres, signalisation, chantiers et faux piétons remplis de capteurs. La Corée du Sud a également entrepris des travaux pour faire sa propre ville de test, deux fois plus grande et sous le nom de K-City.
 Une rue artificielle de la Mcity du Michigan
Une rue artificielle de la Mcity du Michigan
 Plan de la future K-City coréenne
Plan de la future K-City coréenne
Ce plan nous indique qu’il y aura la présence de voies d’accélération avec autoroute, des voies réservées aux bus, des zones à risques (école, arrêts de bus, pistes cyclables…), différentes routes (asphalte, routes mal entretenues, chemin de sable…). De quoi sermonner les voitures !
À l’aide de toutes ces technologies, les véhicules autonomes pourraient facilement s’intégrer dans notre monde et il existe des systèmes automatisés qui très utilisés, voir obligatoires ! Les avions, les bateaux, les satellites ou les sondes spatiales par exemple sont équipées d’un pilotage automatique qui permet aux opérateurs de ne plus avoir à diriger leur véhicule mais seulement d’indiquer et de contrôler sa trajectoire. Les avions sont même capable d’effectuer un atterrissage grâce au pilote automatique !
 Avion en phase d’atterrissage
Avion en phase d’atterrissage
 La sonde spatiale New Horizons autour de Pluton a effectué de nombreuses régulations de trajectoire sans intervention humaine
La sonde spatiale New Horizons autour de Pluton a effectué de nombreuses régulations de trajectoire sans intervention humaine
Expérimentation :
Pour l’expérimentation nous avons déjà cherché ce que nous voulions montrer par une expérience.
Nous avons finalement décidé de se pencher sur les capteurs utilisés par une voiture autonome. Nous avions le choix entre des capteurs de différentes sortes, le lidar, qui est un capteur extrêmement cher, des caméras, des radars ou encore des capteurs à ultra sons. Notre choix s’est tourné vers le capteur a ultrasons, il n’est pas cher, est facilement exploitable et assez fiable. Nous avons choisi un capteur a ultrasons basé sur la puce HC-SR04 pour le faire fonctionner avec un Arduino.
Nous avons écrit un programme permettant de calculer la distance a partir du temps d’écart entre l’envoi et la réception de l’onde. Nous avons utilisé comme support un Arduino qui est une carte électronique programmable. On a ensuite raccordé le capteur, un écran et on l’a branché au pc. On a donc pu faire des courbes à partir des donnés du capteur.
On a testé la réactivité du capteur vis a vis de différents matériaux, avec des matières comme le polystyrène et le tissu le signal ne revenait pas correctement.
Les limites de la voiture autonome
Législation :
De nombreuses lois sont contraires à l’utilisation et la commercialisation des voitures autonomes . Si l’on veut, un jour, voir les voitures autonomes sur les routes Françaises de nombreux changements de textes de lois s’imposent. Mais avant cela, il faudrait que les populations soient rassurés quant à l’idée de voir des voitures autonomes circuler librement.
La législation de Vienne de 1968 empêche la circulation des voitures autonomes :
-Tout véhicule en mouvement ou tout ensemble de véhicules en mouvement doit avoir un conducteur.
-tout conducteur doit être maître de son véhicule, et donc avoir les deux mains sur le volant.
En France des nouvelles lois permettent la circulation des voitures dites à l’essai dans certaines villes tels que Rouen.
En Europe, de nombreux pays autorisent déjà la circulation des voitures autonomes. La Belgique, l’Allemagne, Ils sont des exemples à suivre pour la France.
Il y a aussi plusieurs états aux États-Unis qui ont déjà changés leurs lois permettant une avancée fulgurante pour la recherche et les essais.
Limites techniques
Un autre limite est la compatibilité logicielle entre les différents systèmes, c’est a dire la capacité de deux voitures dotés d’un système d’exploitation différent, à se considérer entre elles, car l’avantage d’une voiture autonome est le fait de pouvoir se connecter avec les voitures proches pour échanger des informations. Si les différents constructeurs ne s’accordent pas sur une communication universelle entre ces modèles, l’utilité de ce genre de systèmes est amoindrie.
Il y a aussi les risques de piratage, en effet aucun système connecté est protégé contre tout risque, car la base de cette connexion est l’échange de donnés. Récemment des hackers ont réussi a déverrouiller des voitures qui ne sont pas autonomes en interceptant le code numérique des clés sans contact (qui ressemblent à une sorte de carte).
Limites économiques
Le cout énorme de la voiture autonome est un frein majeur a son développement, ce coût est fortement dû aux capteurs et au système informatique a bord, certes cela ferai baisser la mortalité sur les routes mais a un prix trop élevé pour l’instant en tout cas.
Comment bien choisir l’assurance de votre véhicule ?
Si vous avez décidé d’acheter une voiture, il va falloir penser à choisir une assurance. On pourrait penser qu’assurer une voiture peut relever du parcours du combattant, tant le choix de compagnies d’assurances est large. Mais vous allez voir que grâce à quelques astuces, il est tout à fait possible de trouver un contrat adapté à vos besoins, sans payer trop cher et sans y perdre trop de temps.
Commencer par lister ses besoins
Vous l’avez peut-être déjà constaté, il existe de nombreuses garanties et options dans les contrats d’assurances et on a vite fait de s’y perdre. Justement, pour éviter de se retrouver noyé par les différentes informations, il peut être judicieux de préparer le terrain avant de démarrer vos recherches. Pour cela, vous pouvez notamment dresser une liste d’éléments qui vous semblent essentiels à prendre en compte pour votre futur contrat :
- La disponibilité du service client en cas de question ou de problème ;
- La prise en charge et/ou le montant des remboursements en cas de réparations sur votre véhicule ;
- La possibilité de se faire prêter un véhicule de courtoisie si le vôtre est immobilisé ;
N’hésitez pas à vous baser sur vos expériences précédentes pour noter ce qui a pu vous poser problème, pour y être attentif cette fois-ci.
Dirigé par :
M.TALON (Sciences de l’ingénieur)
M.LEFEVRE (Physique-chimie)
Mme.BALLARINI (Documentaliste)
Production de :
BEAUDOIN Thomas
DANET Victorien
AUPIAIS Célien



Salut! Super TPE bravo! nous avons fait notre TPE sur les voitures autonomes aussi et nous passons mercredi.
est ce que vous pouvez nous dire les types de questions qui vous ont été posés?
Merci
Vous avez eu votre note ? Pcq c’est pas mal du tout !
Merci pour ton commentaire, pour ce qui est des notes, comme c’est une épreuve au bac ça tombe en même temps que les notes de français soit courant juillet, on aura peut être l’occasion de faire un petit brief à ce moment la 😉